OpenClaw🦞 vs Harness 架构对比分析
- 原文链接
- https://mp.weixin.qq.com/s/wsOziXiKOWUYEShavJOQRA
- 来源公众号
- 苏哲管理咨询
- 作者
- CY
- 发布时间
- 2026-03-19
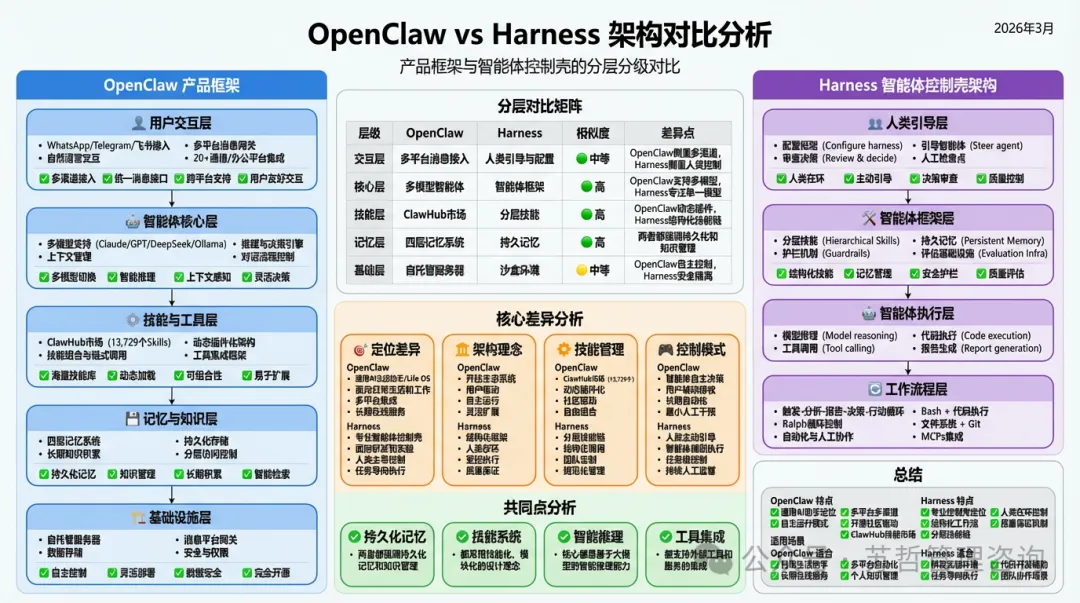
摘要:OpenClaw 🦞与 Harness 是两类理念迥异的智能体架构,前者定位为通用型开放智能体框架,后者聚焦专业级智能体控制壳,二者在分层结构、控制逻辑与应用场景上形成鲜明对照。OpenClaw🦞 采用用户交互层、智能体核心层、技能与工具层、记忆与知识层、基础设施层的五层架构,依托多模型兼容、ClawHub 海量技能市场与多平台消息接入,主打自主运行、开放生态与长期在线服务,以最小化人工干预实现个人生活、办公与多平台自动化。Harness 同样为五层架构,以人类引导层为入口,通过智能体框架、执行层、工作流程层与沙盒基础设施,强化人机协同、人工审查与任务闭环控制,更适配研发实验、代码开发与结构化任务执行。
两者在持久化记忆、模块化技能、大模型推理与工具集成上具备共性,但核心差异显著:OpenClaw 🦞侧重用户驱动、自主决策与社区化扩展,Harness 强调人类主导、受控执行与质量保障。整体来看,OpenClaw 🦞面向通用个人与日常场景,追求自主性与通用性;Harness 面向专业研发与团队协作,追求可控性与规范性。二者分别代表了智能体 “自主服务” 与 “受控辅助” 两大技术路线,可根据使用主体、控制需求与业务场景灵活选用。
产品框架与智能体控制壳的分层分级对比
一、架构分层对比
OpenClaw 🦞产品框架 (5层架构)
第1层: 用户交互层
- 多平台消息接入 (WhatsApp/Telegram/飞书/微信/钉钉等)
- 20+通信/办公平台集成
- 自然语言交互
- 统一消息网关
第2层: 智能体核心层
- 多模型支持 (Claude/GPT/DeepSeek/Ollama/MiniMax/Kimi/GLM/Qwen等)
- 推理与决策引擎
- 上下文管理
- 对话流程控制
第3层: 技能与工具层
- ClawHub市场 (13,729个Skills)
- 动态插件化架构
- 技能组合与链式调用
- 工具集成框架
第4层: 记忆与知识层
- 四层记忆系统
- 持久化存储
- 长期知识积累
- 分层访问控制
第5层: 基础设施层
- 自托管服务器
- 消息平台网关
- 数据存储
- 安全与权限
Harness 智能体控制壳架构 (5层架构)
第1层: 人类引导层
- 配置框架 (Configure harness)
- 引导智能体 (Steer agent)
- 审查决策 (Review & decide)
- 人工检查点
第2层: 智能体框架层
- 分层技能 (Hierarchical Skills)
- 持久记忆 (Persistent Memory)
- 护栏机制 (Guardrails)
- 评估基础设施 (Evaluation Infra)
第3层: 智能体执行层
- 模型推理 (Model reasoning)
- 代码执行 (Code execution)
- 工具调用 (Tool calling)
- 报告生成 (Report generation)
第4层: 工作流程层
- 触发-分析-报告-决策-行动循环
- Ralph循环控制
- 任务规划与验证
- 自动化与人工协作
第5层: 基础设施层
- 沙盒环境 (Sandboxed environments)
- Bash + 代码执行
- 文件系统 + Git
- MCPs集成等
二、分层对比矩阵
| 层级 | OpenClaw🦞 | Harness | 相似度 | 核心差异 |
|---|---|---|---|---|
| 交互层 | 多平台消息接入 | 人类引导与配置 | 🟢 中等 | OpenClaw侧重多渠道接入,Harness侧重人类主动控制 |
| 核心层 | 多模型智能体 | 智能体框架 | 🟢 高 | OpenClaw支持多模型切换,Harness专注单一模型优化 |
| 技能层 | ClawHub市场 | 分层技能链 | 🟢 高 | OpenClaw动态插件化,Harness结构化技能调用 |
| 记忆层 | 四层记忆系统 | 持久记忆 | 🟢 高 | 两者都强调持久化和知识管理 |
| 基础层 | 自托管服务器 | 沙盒环境 | 🟡 中等 | OpenClaw自主控制,Harness安全隔离 |
三、差异分析
差异1: 定位差异
OpenClaw🦞:
- ✅ 通用AI生活助手/Life OS
- ✅ 面向日常生活和工作
- ✅ 多平台集成
- ✅ 长期在线服务
- ✅ 用户被动接收
Harness:
- ✅ 专业智能体控制壳
- ✅ 面向研发和实验
- ✅ 人类主导控制
- ✅ 任务导向执行
- ✅ 人类主动引导
差异2: 架构理念
OpenClaw🦞:
- ✅ 开放生态系统
- ✅ 用户驱动
- ✅ 自主运行
- ✅ 灵活扩展
- ✅ 社区共建
Harness:
- ✅ 结构化框架
- ✅ 人机协同 (Human-in-the-loop)
- ✅ 受控执行
- ✅ 质量保证
- ✅ 团队协作
差异3: 技能管理
OpenClaw🦞:
- ✅ ClawHub市场 (13,729个Skills)
- ✅ 动态插件化
- ✅ 社区驱动
- ✅ 自由组合
- ✅ 即插即用
Harness:
- ✅ 分层技能链
- ✅ 结构化调用 (/debug → /fix → /report)
- ✅ 团队定制
- ✅ 规范化管理
- ✅ 可组合链式调用
差异4: 控制模式
OpenClaw🦞:
- ✅ 智能体自主决策
- ✅ 用户被动接收
- ✅ 长期自动化
- ✅ 最小人工干预
- ✅ 持续在线服务
Harness:
- ✅ 人类主动引导
- ✅ 智能体辅助执行
- ✅ 任务级控制
- ✅ 持续人工监督
- ✅ 审查与决策机制
四、共性分析
共同点1: 持久化记忆
- 两者都强调持久化记忆和知识管理
- 支持长期知识积累
- 分层访问控制
- 智能检索能力
共同点2: 技能系统
- 都采用技能化、模块化的设计理念
- 支持技能组合和链式调用
- 可扩展的技能框架
- 工具集成能力
共同点3: 智能推理
- 核心都是基于大模型的智能推理能力
- 上下文感知
- 决策制定
- 自然语言理解
共同点4: 工具集成
- 都支持外部工具和服务的集成
- API调用能力
- 第三方服务连接
- 扩展性强
五、适用场景对比
OpenClaw🦞 适合:
场景1: 日常生活助手
- 多平台消息管理
- 日程安排和提醒
- 信息查询和整理
- 个人知识管理
场景2: 多平台自动化
- 跨平台消息同步
- 自动化工作流
- 数据聚合和分析
- 智能通知推送
场景3: 长期在线服务
- 24/7持续服务
- 长期知识积累
- 用户习惯学习
- 个性化服务
场景4: 个人知识管理
- 知识库构建
- 信息检索
- 学习辅助
- 记忆增强
Harness 适合:
场景1: 研发实验环境
- 模型训练辅助
- 实验流程管理
- 数据分析和报告
- 性能评估
场景2: 代码开发辅助
- 代码生成和优化
- Bug调试和修复
- 代码审查
- 文档生成
场景3: 任务导向执行
- 结构化任务执行
- 工作流程控制
- 质量保证
- 结果验证
场景4: 团队协作场景
- 多人协作
- 任务分配
- 进度跟踪
- 知识共享
六、技术架构对比
OpenClaw 🦞技术特点:
- 多模型支持 - 灵活切换不同AI模型
- 动态插件化 - ClawHub市场提供海量技能
- 自主运行 - 最小人工干预,长期在线
- 开源生态 - MIT开源,社区驱动
- 多平台集成 - 20+平台无缝接入
Harness 技术特点:
- 人机协同 - 人类主导控制和决策
- 结构化技能链 - 分层技能,规范化调用
- 质量保证 - 护栏机制,评估基础设施
- 安全隔离 - 沙盒环境,安全执行
- 工作流控制 - Ralph循环,任务规划验证
七、选择建议
选择 OpenClaw 🦞如果你需要:
- ✅ 通用AI生活助手
- ✅ 多平台消息管理
- ✅ 长期自动化服务
- ✅ 个人知识管理
- ✅ 开源自主控制
- ✅ 社区驱动的技能生态
选择 Harness 如果你需要:
- ✅ 专业研发辅助
- ✅ 人类主导控制
- ✅ 结构化工作流
- ✅ 代码开发辅助
- ✅ 质量保证机制
- ✅ 团队协作环境
八、未来发展方向
OpenClaw🦞 可能的演进:
- 更多平台集成
- 更智能的自主决策
- 更丰富的技能市场
- 更强大的知识管理
- 更好的用户体验
Harness 可能的演进:
- 更精细的人类控制
- 更强大的质量保证
- 更智能的工作流
- 更好的团队协作
- 更完善的评估体系
总结
OpenClaw🦞和Harness代表了两种不同的智能体架构理念:
- OpenClaw🦞 强调自主性、开放性和通用性,适合作为日常生活助手和长期在线服务
- Harness 强调控制性、结构性和专业性,适合作为研发辅助和任务导向执行
两者在技能系统、记忆管理和智能推理方面有相似之处,但在定位、控制模式和适用场景上有明显差异。选择哪个架构取决于具体的应用场景和需求。